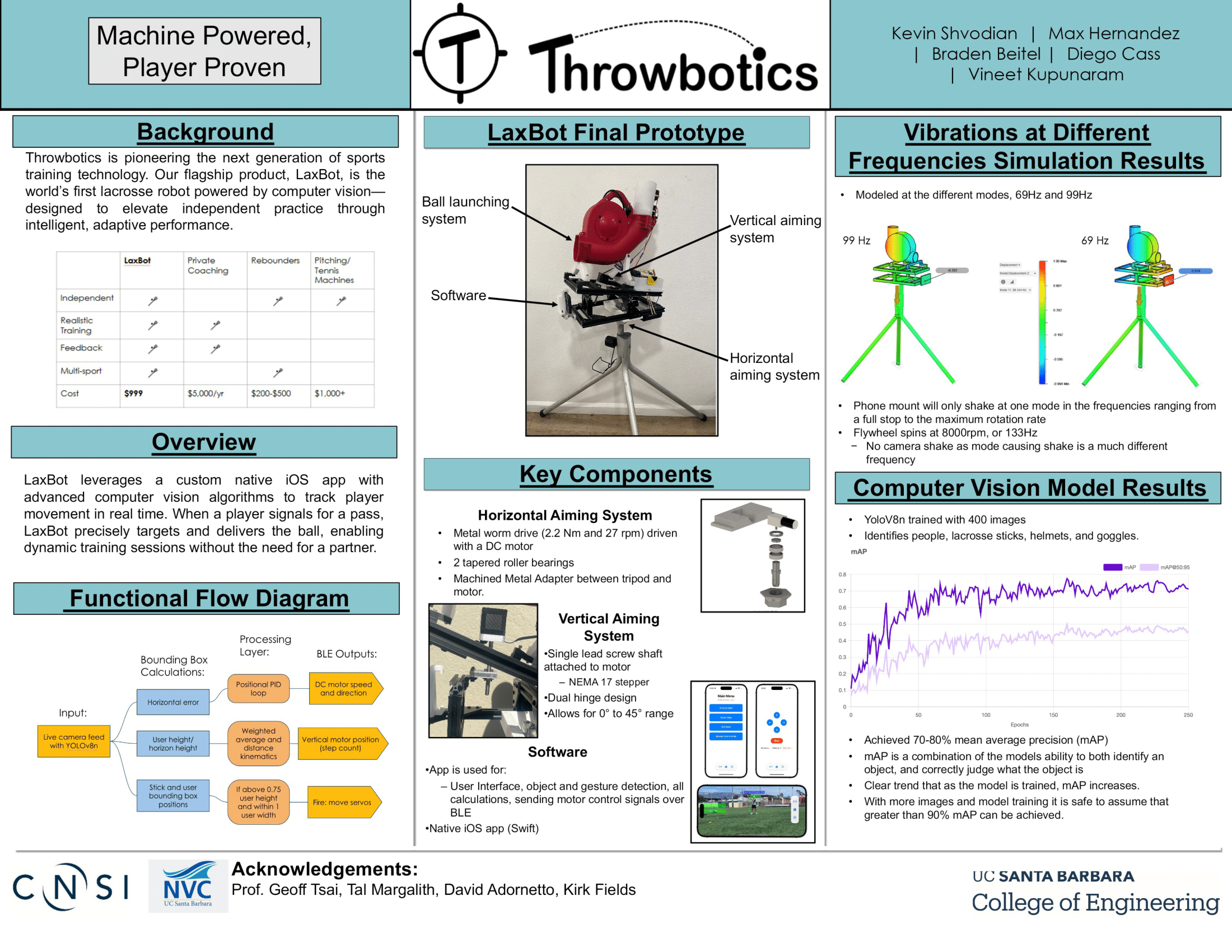
LaxBot Overview
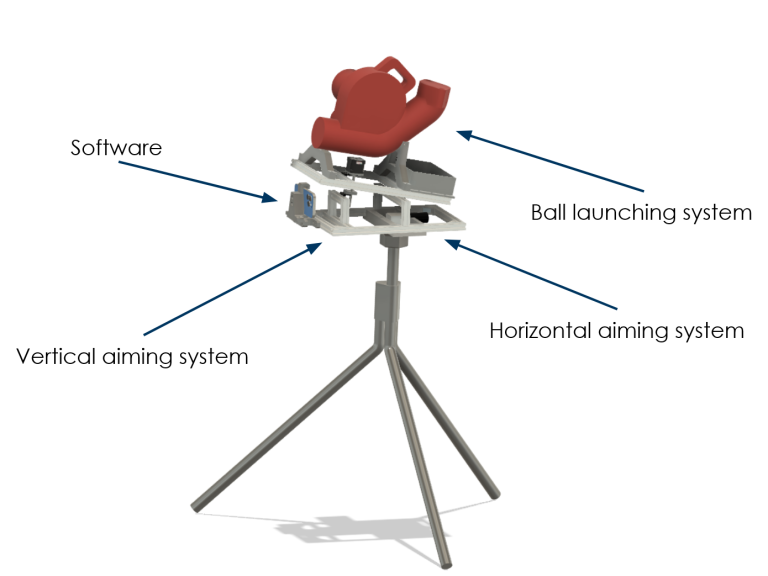
LaxBot is an autonomous machine designed to deliver accurate passes lacrosse players allowing single player training. Utilizing an off the shelf baseball pitching machine, LaxBot delivers on the promise of creating a proof of concept product at a competitive production cost when compared to competitors of a similar market. It is powered through a drill battery and the iPhone's software. My role on the project was delegated to the aiming mechanisms of the machine and portions of the design, allowing me to practice CAD design on Fusion360, 3D printing practices, and component selection to cut costs yet maintain quality.