BOTany Design Project
Tasked with the goal of devising our own problem and creating a solution, I was the lead of a team of 4 total engineers to create what we would later call BOTany.
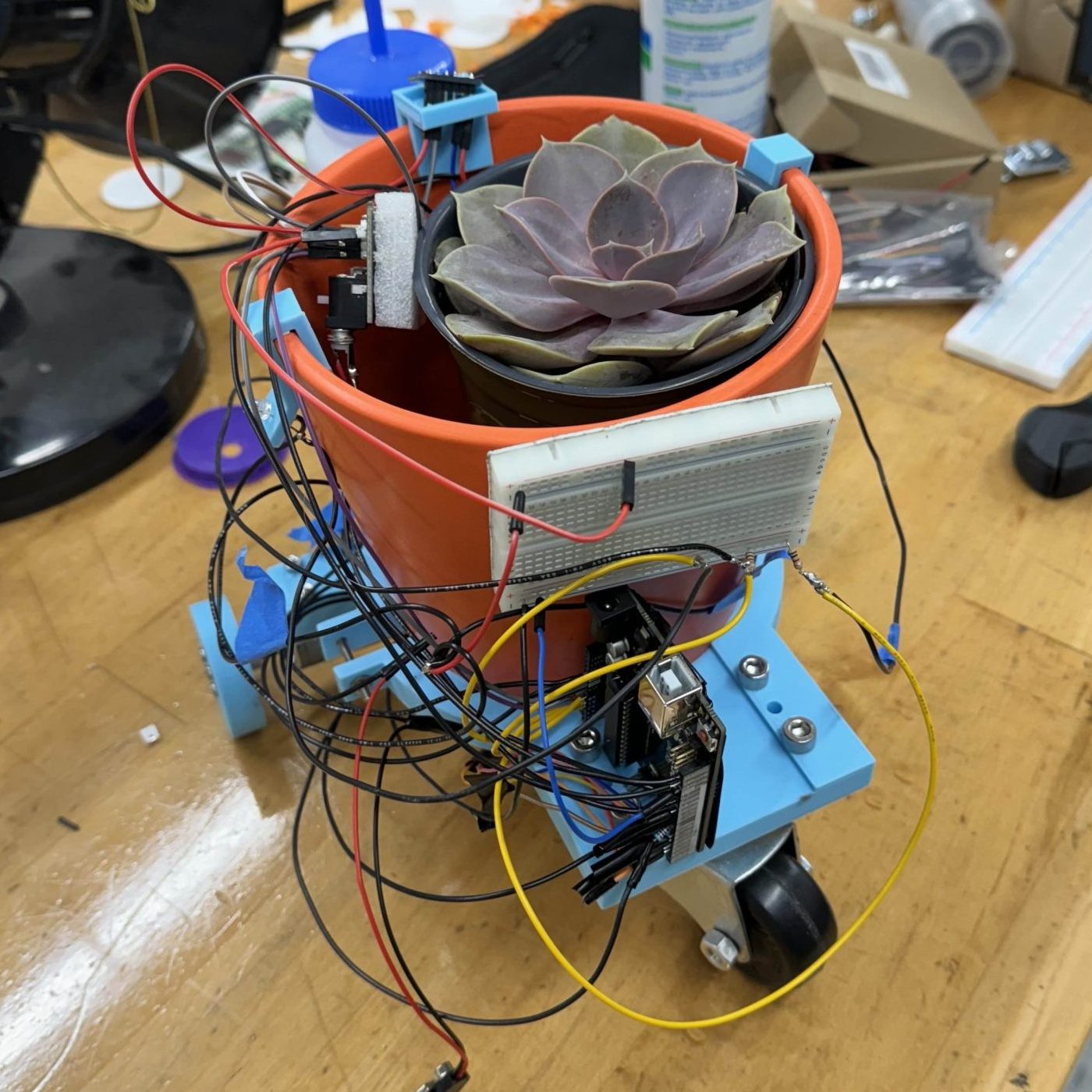
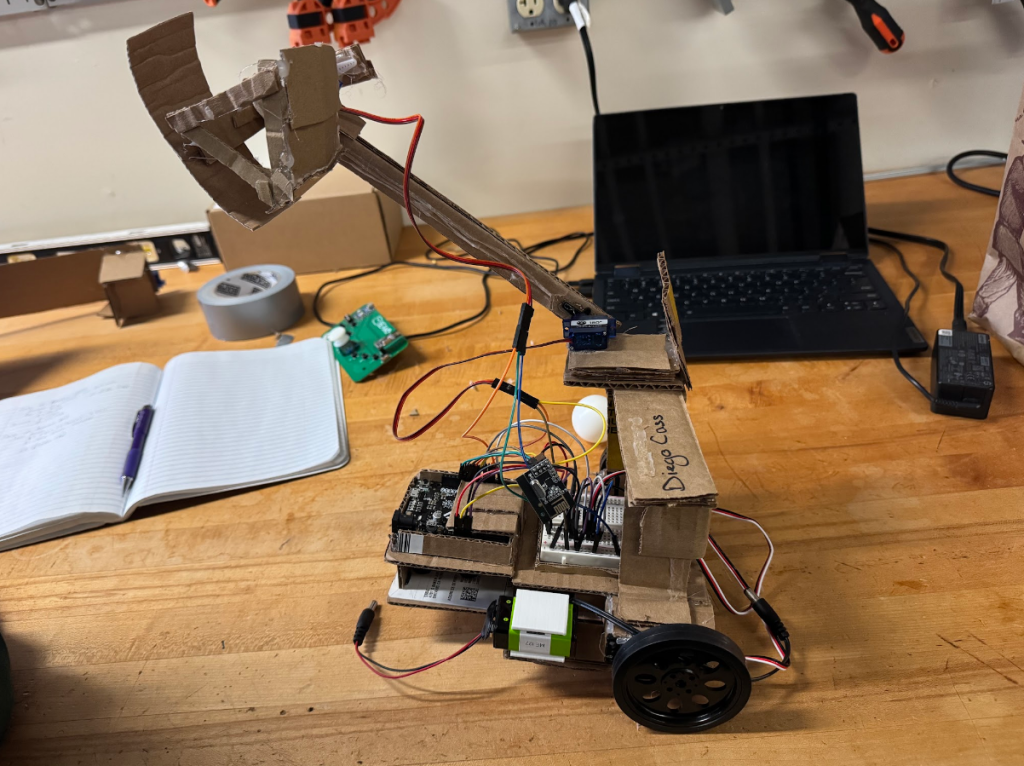
Our goal was to solve the problem of a plant not receiving enough sunlight or even too much sunlight. Our solution was to make a mobile robot that would detect light and move towards and away from light depending on the type of plant.
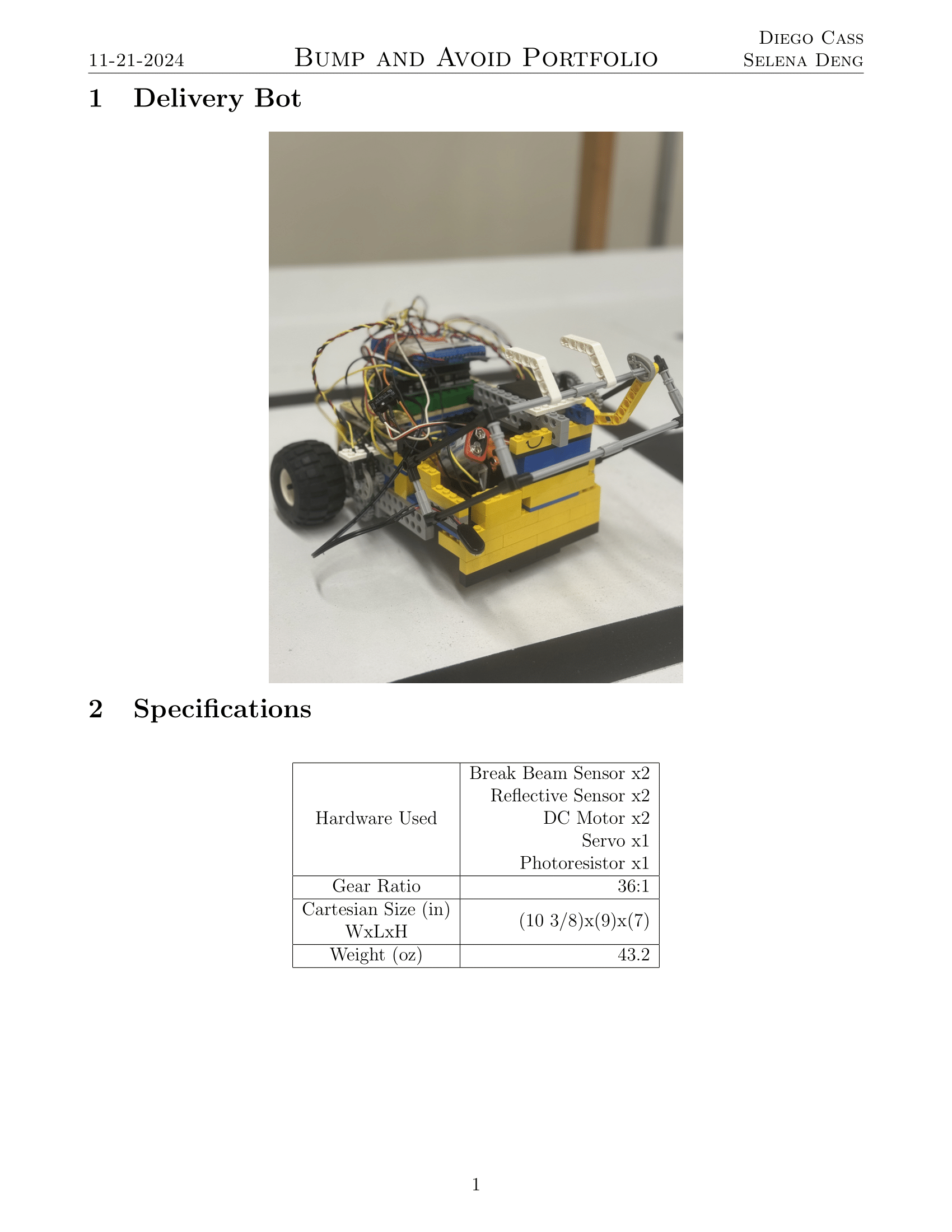
The design seen to the right works through having a front sunlight/UV detecting diode and two cheaper photodiodes to the sides to pinpoint if it’s in sunlight and which direction it should move in.